Bewegungsmerkmale
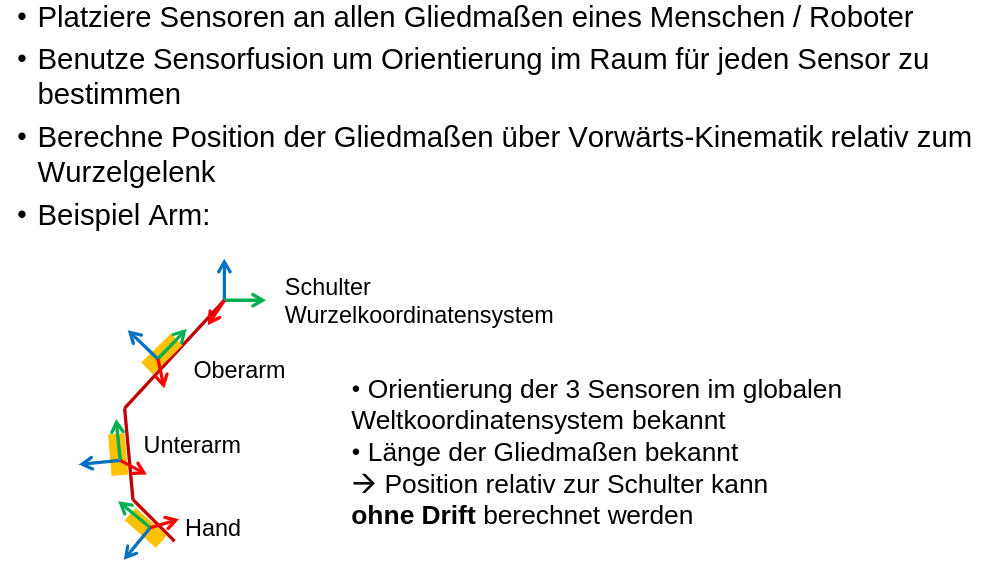
Sensor Fusion mit IMU
Initialsensor
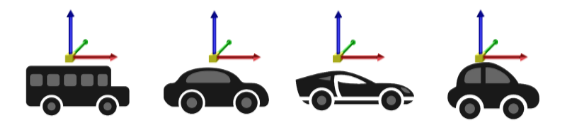
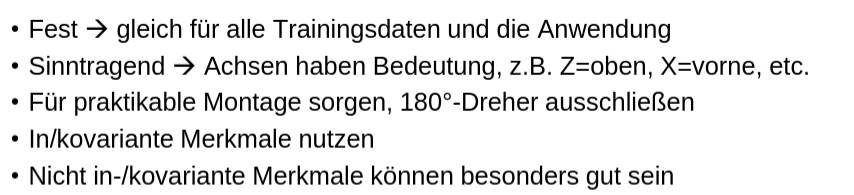
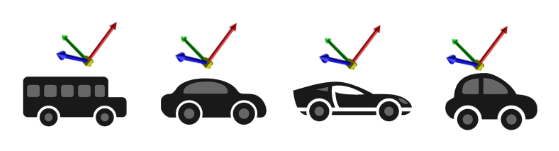
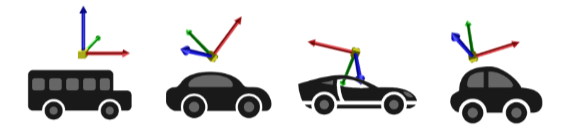
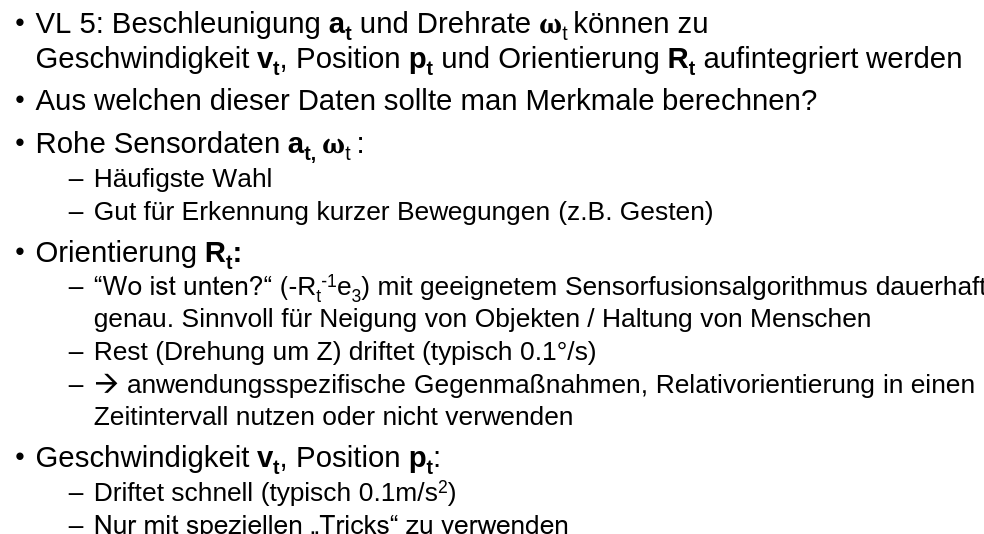
Orientierung
Was ist empfelen?
fest & sinntragend fest wechselt zwischen Nutzungen ändert sich ständig Invariante Merkmale x x x x Kovariante Merkmale x x Merkmale die beides nicht sind. x Auf ein sinntragendes festes Koordinatensystem umrechnen. x x x fest & sinntragend
fest
wechselt zwischen Nutzungen
ändert sich ständig
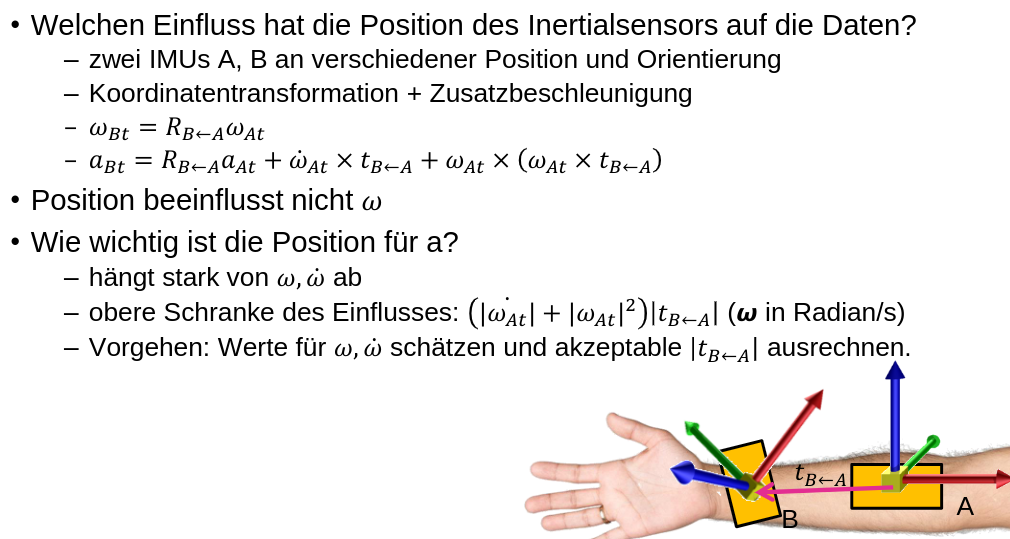
Zwei IMUs
Link to original