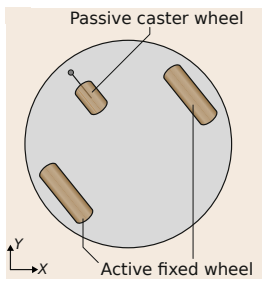
Setup
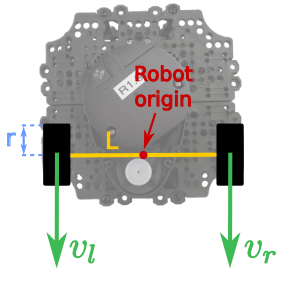
- It has two driveable wheels which are independently controllable, mounted along a common axis.
- One or more low-friction caster wheels are used to keep the robot horizontal.
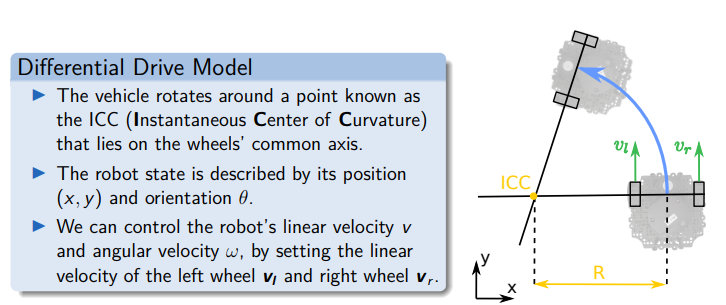
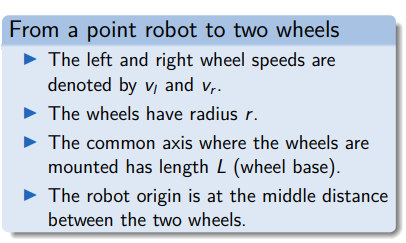
From a point robot to two wheels Instead of a point robot, the TurtleBot is now modeled as a robot with:
- two wheels,
- two motors, and
- a motor controller.
also see: Wheel Encoder
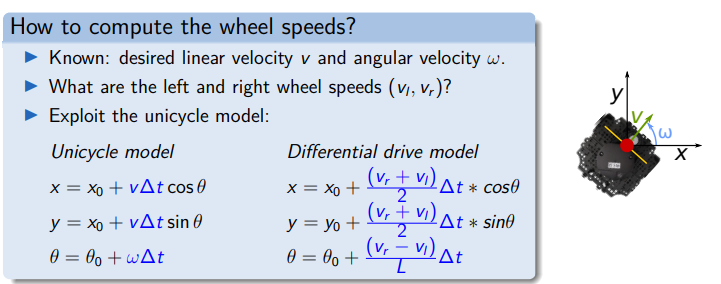
Odometry
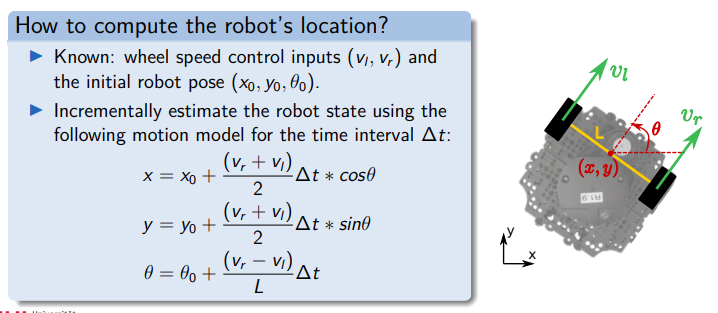
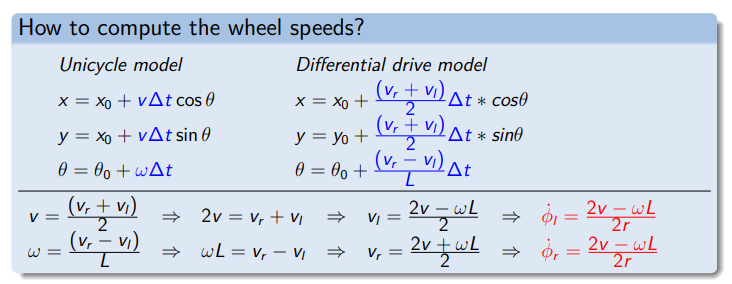
Wheel speed