Overview
Pros:
- Cheap
- High frequency
Cons:
- Drift due to wheel slippage
- Only reliable on short term.
Function
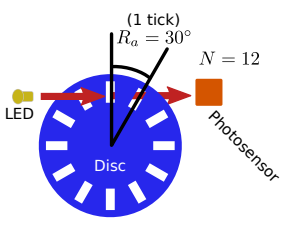
The encoder outputs the number of resolutions n (tick counts) that the motor has turned in a time interval ∆t.
We know:
- the encoder number of ticks N
- angular resolution Ra = 2π/N [rad/tick]
- on-ground distance resolution Rd = 2πr/N [m/tick]
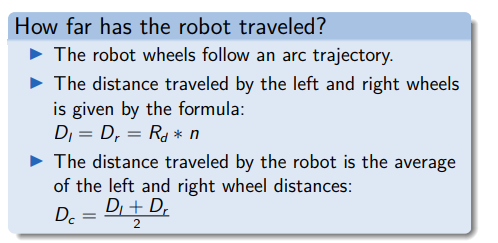
How far has the robot traveled?
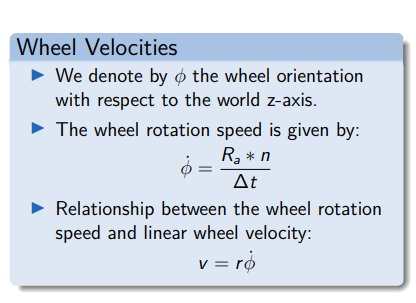
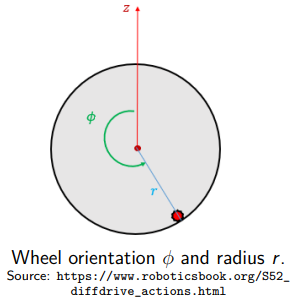
Wheel Velocity