Forward-search is sound
Any plan that is returned is guaranteed to be a solution
Forward-search also is complete
If a solution exists then Forward-search will return a solution.
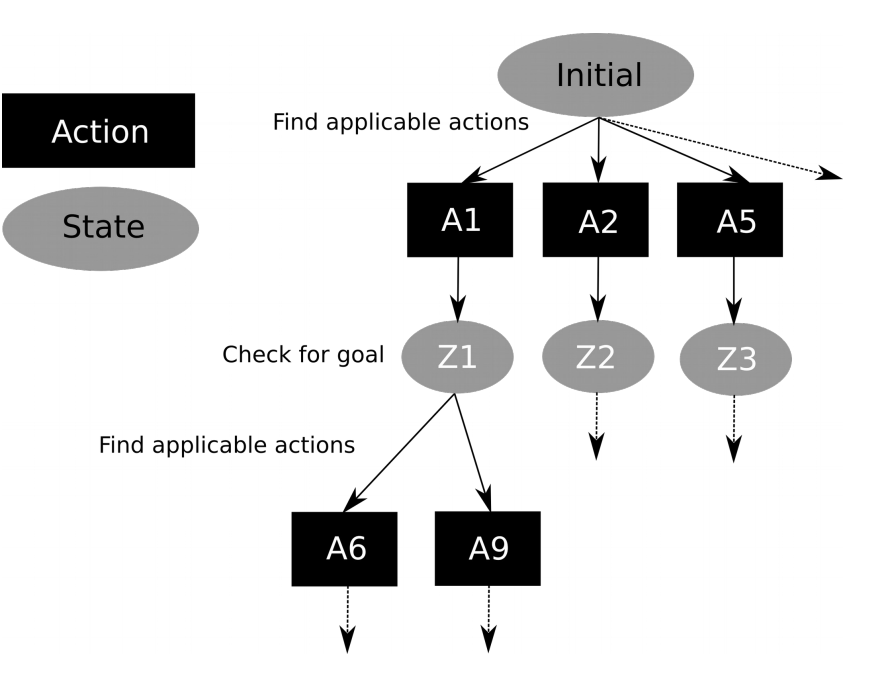
Search proceeds as follows:
- The algorithm starts the search at the initial state.
- If the initial state satisfies the goal, then search ends and we get a plan of length zero.
- If not, the algorithm applies all applicable actions to the initial state to produce new states.
- It checks if any of the new states satisfies the goal.
- If yes, search ends.
- If not, then search continues by applying actions to each of the new states.
- Search continues until either all reachable states have been examined or a goal state has been reached.
- If a goal state is reached, the algorithm returns the sequence of actions that led from the initial state to the found goal state.
Some deterministic implementations of forward search:
- breadth-first search
- best-first search (e.g., A*)
Breadth-first and best-first search are sound and complete.
- But they usually aren’t practical because they require too much memory.
- Memory requirement is exponential in the length of the solution.
Forward search can have a very large branching factor.
- E.g., many applicable actions that don’t progress toward goal.
- Why this is bad:
- Deterministic implementations can waste time trying lots of irrelevant actions.
- Need a good heuristic function and/or pruning procedure.