lecture08-part2-task-planning-representation-algorithms-0.pdf
Constant symbols for concrete things:
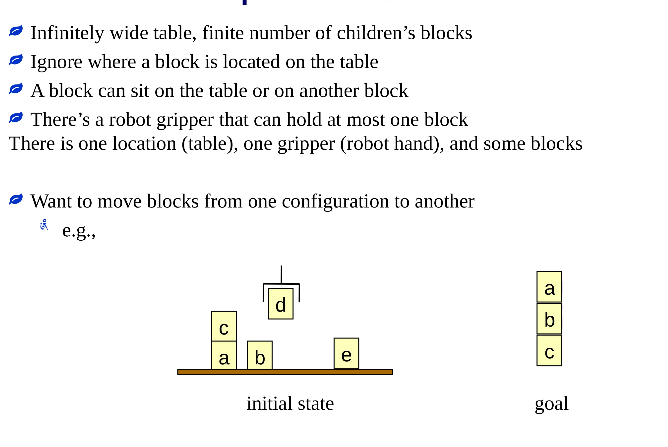
The blocks: a, b, c, d, e
Predicates to represent conditions:
- ontable(x) - block x is on the table
- on(x,y) - block x is on block y
- clear(x) - block x has nothing on it
- holding(x) - the robot hand is holding block x
- handempty - the robot hand isn’t holding anything
Predicates have the form predicate-symbol(arguments).
States
a set of ground predicates
- Represents the conditions or facts that are true in that state.
- Since we have only a finite no. of predicates and a finite no. of constant symbols, we have only a finite no. of possible states.
Closed world assumption: What is not known to be true is assumed to be false.
Operators
Operators are generalizations of actions.
Operator: a triple o=(name(o), precond(o), effects(o))
- precond(o): preconditions
- Predicates and their negations that must be true in order to use the operator.
- effects(o): effects
- Predicates and their negations that the operator will make true.
- name(o): a syntactic expression of the form n(x1 ,…,xk )
- n is an operator symbol - must be unique for each operator.
- (x1 ,…,xk ) is a list of every variable symbol (parameter) that appears in o.
Rather than writing each operator as a triple, we’ll usually write like this:
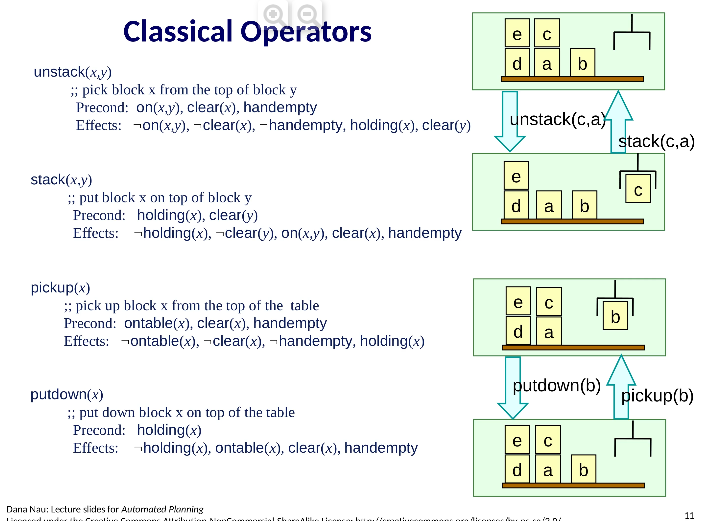
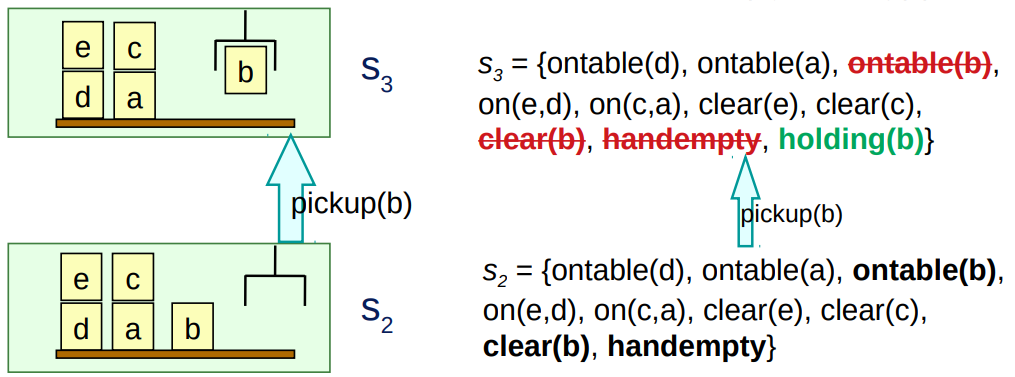
pickup(x)
;; gripper picks up block x from the top of the table
Precond: ontable(x), clear(x), handempty
Effects: not ontable(x), not clear(x), not handempty, holding(x)
Actions
An action is a ground instance (via substitution) of an operator
- Suppose we substitute x with b.
- Then we get the following action:
- pickup(b)
- precond: ontable(b), clear(b), handempty
- effects: not ontable(b), not clear(b), not handempty, holding(b)
i.e., The robot’s gripper picks up block b off the table.
Notation
Let a be an operator or action. Then
-
precond+ (a) = {predicates that appear positively in a’s preconditions}
-
precond– (a) = {predicates that appear negatively in a’s preconditions}
-
effects+ (a) = {predicates that appear positively in a’s effects}
-
effects– (a) = {predicates that appear negatively in a’s effects}
Example:
pickup(b)
precond: ontable(b), clear(b), handempty
effects: not ontable(b), not clear(b), not handempty, holding(b)
-
precond+ (pickup(b)) = {ontable(b), clear(b), handempty}
-
precond- (pickup(b)) = {}
-
effects+ (pickup(b)) = {holding(b)}
-
effects– (pickup(b)) = {ontable(b), clear(b), handempty)}
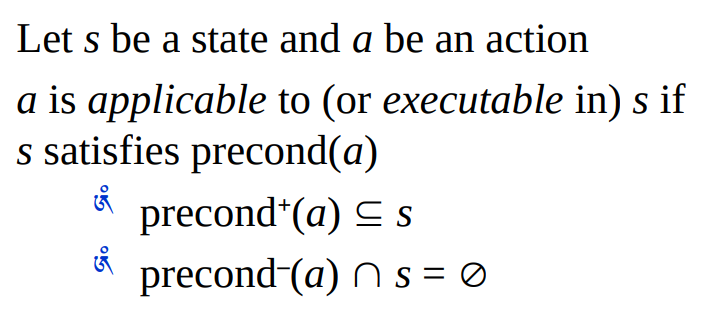
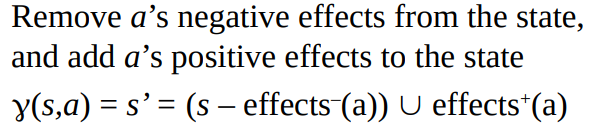
Executing an Applicable Action
Goal
a set of ground predicates or its negations
- Represents the conditions that should hold in a goal state.
- Positive goal conditions should be present in the goal state and negavite goal conditions should be absent in the goal state.
goal = {on(b,c), on(a,b)}
Solutions
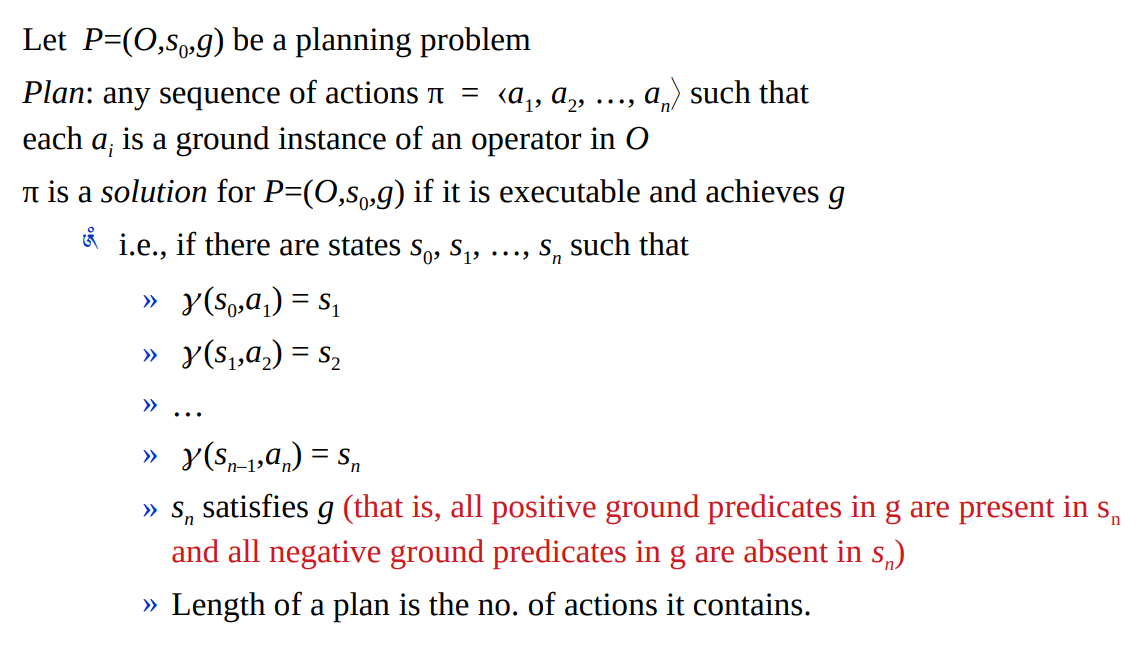
Planner
Given a planning domain and a planning problem, how can the robot autonomously find a plan, i.e. a sequence of actions, in order to go from the initial state to a state that satisfies the goal?
Algorithms that do this are called planners.Three Main Types of Planners
Domain-specific planners
- Made or tuned for a specific planning domain
- Most successful real-world planning systems work this way (Mars exploration, sheet metal bending, playing bridge, etc.)
- Won’t work well (if at all) in other planning domains
Domain-independent planners ⇒ focus of most research
- In principle, works in any planning domain
- In practice, need restrictions on what kind of planning domains it can be applied
- e.g. Classical Task Planning
Configurable planners
Link to original
- Domain-independent planning engine
- Input includes info about how to solve problems in some domain
Restrictive Assumptions in Classical Task Planning
A0: Finite system:
Finite no. of states and actions.
A1: Fully observable:
The agent always knows the current state of the world.
A2: Deterministic: Each action has only one outcome.
If an action is applied to a state, it will bring the world to a single new state.
A3: Static (no exogenous events):
Changes to the world state can be caused only through the agent‘s own actions.
A4: Attainment goals:
Goal is specified explicitly and corresponds to a set of goal states Sg .
A5: Sequential plans:
A plan is a linearly ordered sequence of actions (a1 , a2 , … an ).
A6: Implicit time:
No time durations; a linear sequence of instantaneous states and actions.
A7: Off-line planning:
Planner doesn’t know the execution status of the plan while it is generating the plan.
Link to original
Planning is Searching…
- Nearly all planning procedures are search procedures.
- In this lecture, we will look at state-space planning, which is used by classical task planners.
-
Similar to path planning algorithms.
-
Here, each node represents a state of the world.
-
Finds a path that starts at the initial state and ends at a goal state.
-
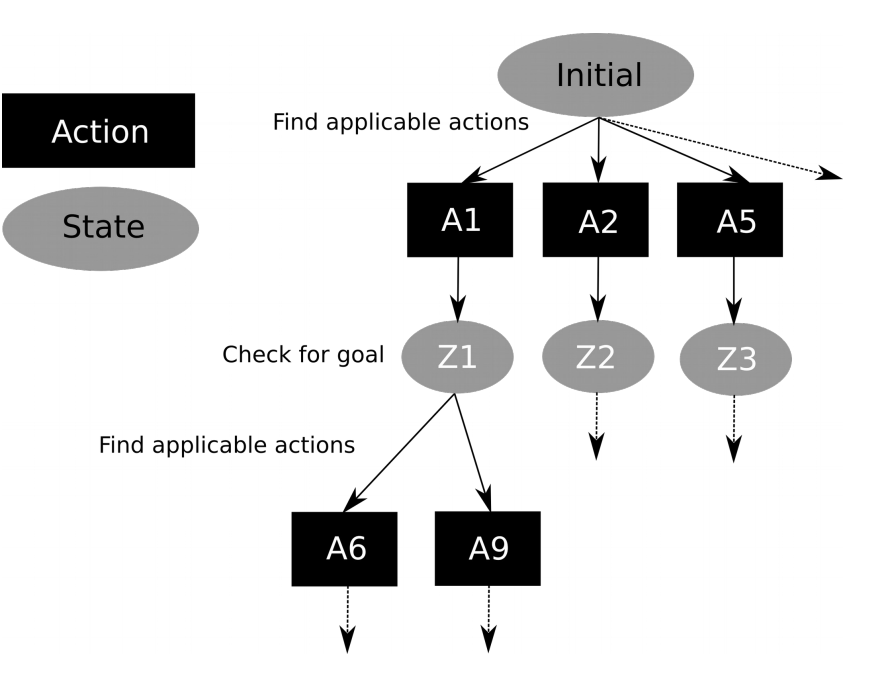
Forward Search
Forward-search is sound
Any plan that is returned is guaranteed to be a solution
Forward-search also is complete
If a solution exists then Forward-search will return a solution.
Search proceeds as follows:
- The algorithm starts the search at the initial state.
- If the initial state satisfies the goal, then search ends and we get a plan of length zero.
- If not, the algorithm applies all applicable actions to the initial state to produce new states.
- It checks if any of the new states satisfies the goal.
- If yes, search ends.
- If not, then search continues by applying actions to each of the new states.
- Search continues until either all reachable states have been examined or a goal state has been reached.
- If a goal state is reached, the algorithm returns the sequence of actions that led from the initial state to the found goal state.
Some deterministic implementations of forward search:
- breadth-first search
- best-first search (e.g., A*)
Breadth-first and best-first search are sound and complete.
- But they usually aren’t practical because they require too much memory.
- Memory requirement is exponential in the length of the solution.
Forward search can have a very large branching factor.
Link to original
- E.g., many applicable actions that don’t progress toward goal.
- Why this is bad:
- Deterministic implementations can waste time trying lots of irrelevant actions.
- Need a good heuristic function and/or pruning procedure.
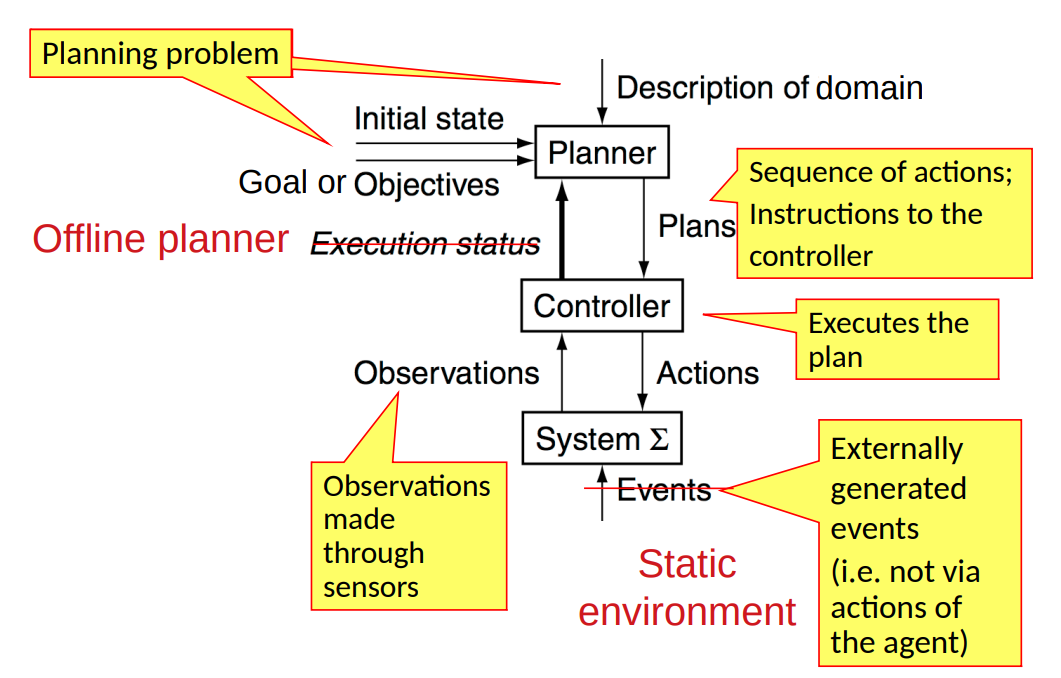
Classical Planning and Acting
Summary
- An example: Blocks world
- Classical representation of the planning domain (constant symbols, predicates, operators), states and actions.
- Applicability of an action to a state
- State transition function
- Assumptions needed for classical Task Planning
- Statement of a classical Task Planning problem
- Three types of planners: domain-dependent, domain-independent, configurable
- State-space planning: Forward Search
- Conceptual model of planning and acting (plan execution).