Example
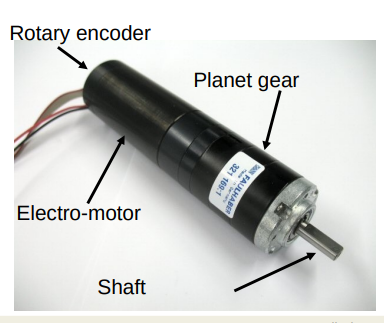
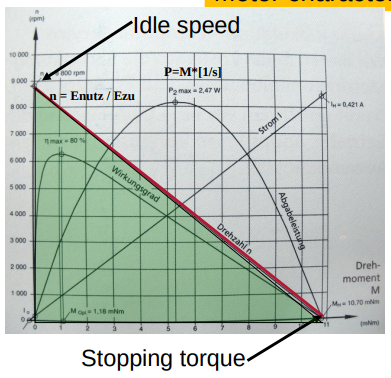
Direct current motors (DC-motors)
- Up to 98% efficiency
- Power cord or battery
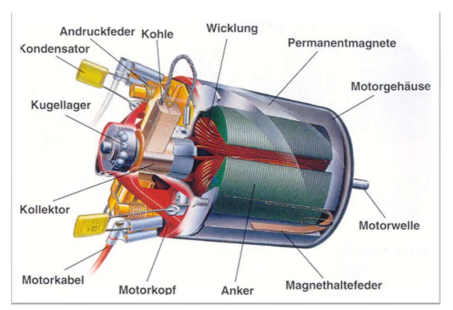
Brush motor:
- cheap
- Mature technology
- Sparking / high-frequency interferences
- Life limit – carbon brushes
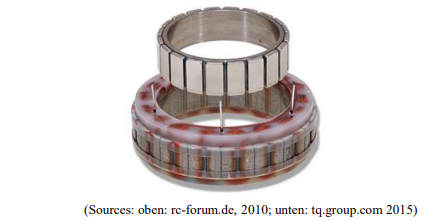
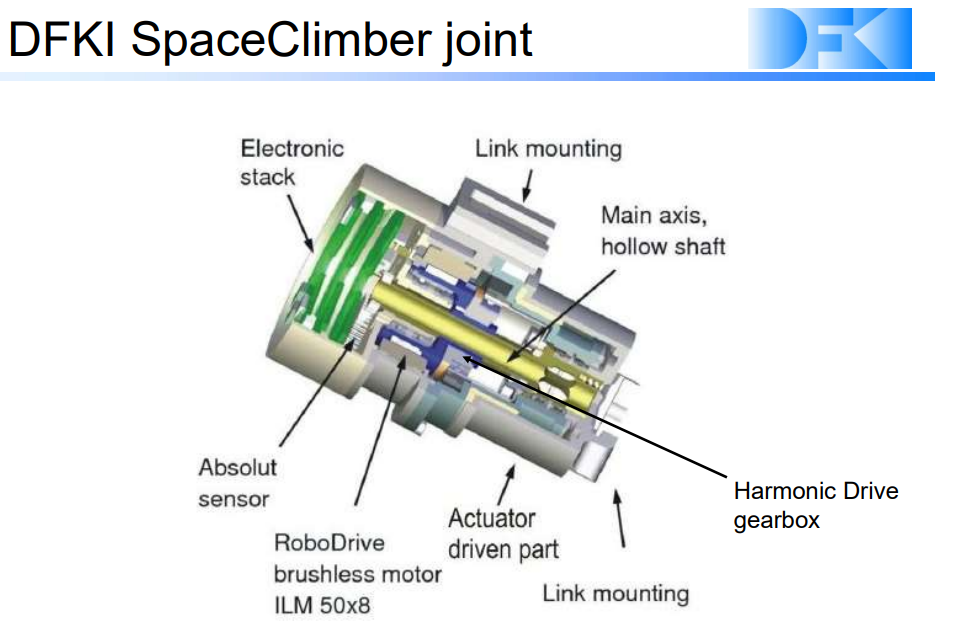
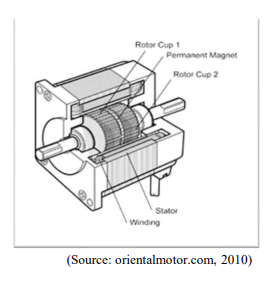
Brushless motor:
- More efficient / less heat
- Less wear
- More power per weight
- Requires a controller
Stepper Motors
-
Revolutions will be made in an amount of steps (degree), not as a constant movement, exact positions can be achieved
-
Bipolar: 2 coils 4 connections (more power per motor-volume)
-
Unipolar: at least 5 connections, simpler control
-
Reluctance motor
- toothed soft iron structured rotor
- No permanent magnets
- Free magnetic flow, no magnetic field after switched off
-
Permanentmagnet motor
- Permanentmagnet on the shaft / Stator made of soft iron
- Moment of rest
- Lower resolution in comparison to ther reluktance motor
-
Hybridmotor
-
Permanentmagnet and toothed soft iron core on the shaft
-
Servos
- Analog servos
- Low power consumption
- Low price
- Digital servos
- Faster positioning time
- Higher resolution
- Partly programmable
- PWM-control
-
Common for hobby servos
-
Servo elektronics regulate the actor (potentiometer) against the motor position
-
The pulse width of the control signal regulates the target position
-
Various variations on pulse widths and travel ranges
-
