Static versus Dynamic Environment
-
Path planning finds a globally optimal path to reach the goal pose from the initial pose.
-
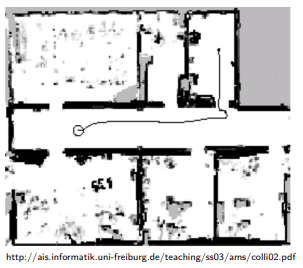
However, it assumes a static world, i.e. the positions of obstacles are fixed and fully known. I But, real-world environments are dynamic.
-
Obstacles may change position dynamically (e.g. furniture may get displaced).
-
New obstacles may appear on the scene (e.g. something falls down from the overhead shelf).
-
Obstacles may be constantly moving (e.g. people or other robots moving through corridors).
-
Global path planning is slow and hence not suitable for fast obstacle avoidance.
Local Approaches
Local Approaches
Basic Idea
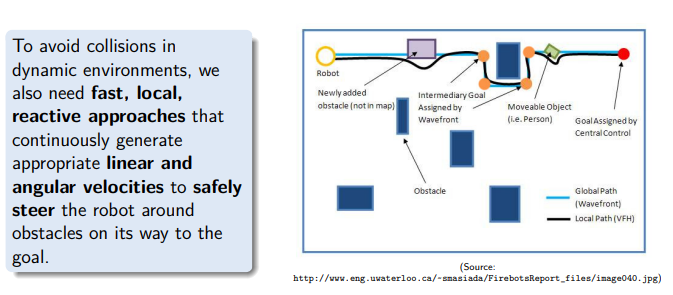
- Sensor data (e.g. lidar, sonar) is used to continuously detect obstacles as the robot moves.
- Odometry data is used to obtain the robot’s current pose and velocity.
- A set of possible solutions (candidates) are generated based on sensor and odometry data to steer the robot.
- An objective function evaluates each possible solution.
- The best (optimal) solution is selected and used to control the robot’s linear and angular velocities.
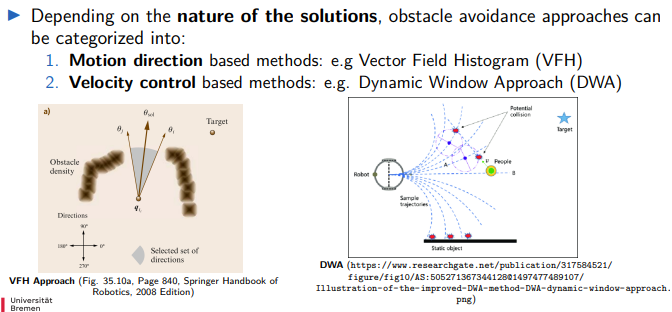
Only a local region around the robot or a short time window is considered at a time for Obstacle Avoidance ⇒ locally optimal motion control.Categories of Approaches
Link to original
Dynamic Window Approach
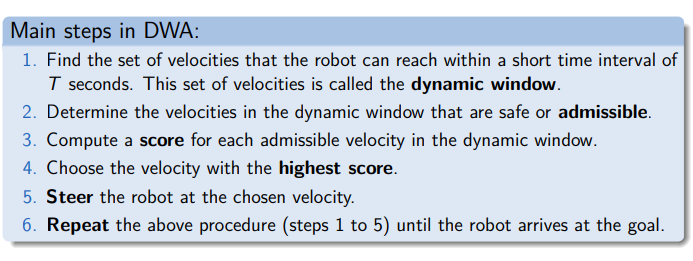
Main Steps
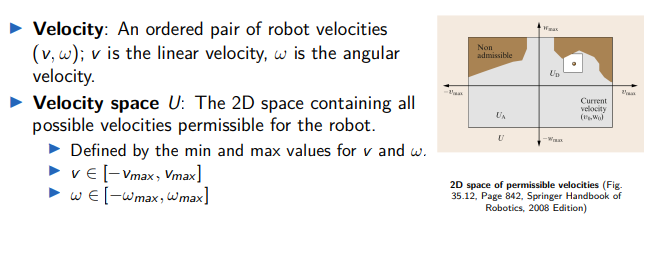
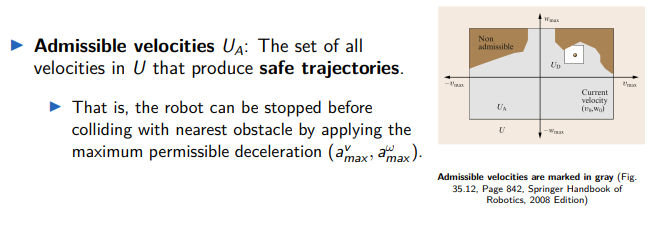
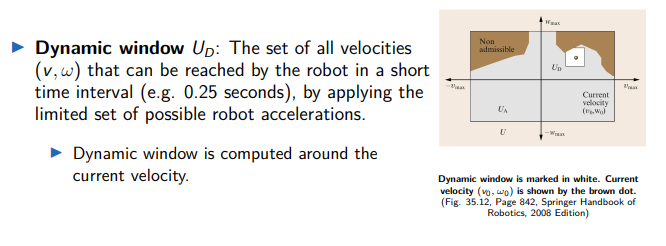
Velocity Space
⇒ Admissible: Grey Area, Non Admissible: Brown Area
⇒ white BoxObjective function F(v, ω)
The objective function F(v, ω) evaluates trajectories based on three criteria:
- Closeness to goal pose: How close to the goal pose would this trajectory bring the robot?
- Clearance from nearest obstacles: How far is the nearest obstacle on this trajectory?
- Speed of motion: How fast does the robot move on this trajectory? I The objective is to drive in the correct direction as fast as possible while staying as far away from obstacles as possible.
Strengths and Weaknesses
Strength:
Fast approach for Obstacle Avoidance.
Weakness:
Difficulty to enter narrow passages and doorways (robot does not stop on time).
Improved DWA:
Optimize position and velocity simultaneously.
Link to original