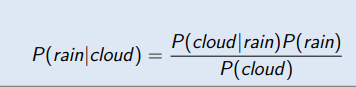
Bayes’ Theorem
⇒ probability of hypothesis A given data B
(posterior belief distribution)
⇒ likelihood of data B given hypothesis A
⇒ independent probability of hypothesis A
(prior belief distribution)
⇒ independent probability of data B
Example
Bayes Filter
Probabilistic method to estimate an unknown probability density function (PDF) recursively over time using incoming sensor measurements and a mathematical process model.
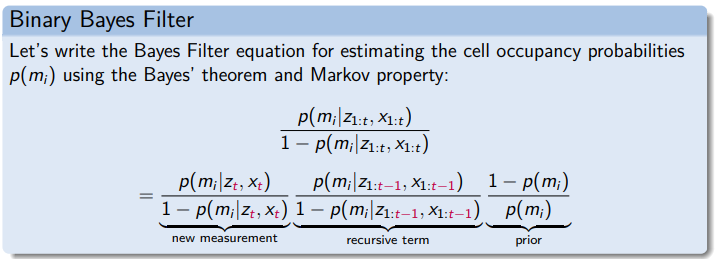
Binary Bayes Filter
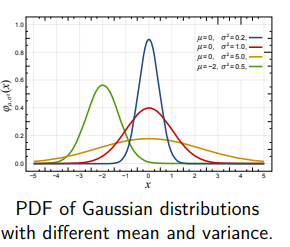
Probability density function (PDF) of a binary variable.

Task
-
Cleaning
-
Resteraunte
-
Security
-
Grid based mapping
Challenges
-
Fast Moving Objects
Von Sensor Daten